
| Version 32 (modified by , 3 years ago) ( diff ) |
|---|
UART Communication
This page gives some tips and tricks regarding serial communication.
Gateworks boards often have connectors available for either RS232 or TTL level UART with and without hardware handshaking. Refer to the board specific hardware manual for pinout details.
Cables are available from Gateworks in the online shop:
- GW10001 10 pin IDC header to DB9
- GW10019 DB9 Gender Changer
- GW10005 DB9 male to DB9 female 6ft cable
Hardware Support
The following product families support UART:
- Venice:
- IMX8M UART
- up to 4Mbd relative to a 1.875MHz clock with 7 or 8 bit data, 1 or 2 stop, programable parity
- Note SP33E RS232 transceiver limit is 1Mbd
- drivers/tty/serial/imx.c
- Newport:
- CN80XX UAA ARM PL011 r1p5 compatible
- up to 10Mbd (Note SP33E RS232 transceiver limit is 1Mbd)
- drivers/tty/serial/amba-pl011.c
- Ventana:
- IMX6 UART
- up to 5Mbd (Note SP33E RS232 transceiver limit is 1Mbd and MAX3223E transceiver limit is 500Kbd)
- drivers/tty/serial/imx.c
See below for more product-specific details
Linux serial port devices
Serial UARTS will be represented as /dev/tty* devices depending on the CPU architecture.
The following table describes the various on-board UARTs for standard Gateworks products. Please consult the board specific hardware user manual for additional details:
| Family | Board | HW Dev | SW Dev | Function |
|---|---|---|---|---|
| Venice | GW710x | UART1 | ttymxc0 | GPS (optional) |
| UART2 | ttymxc1 | console: 3.3V TTL | ||
| UART3 | ttymxc2 | 3.3V TTL J4 | ||
| UART4 | ttymxc3 | 3.3V TTL J41 | ||
| GW720x-B | UART1 | ttymxc0 | GPS (optional) | |
| UART2 | ttymxc1 | console: 3.3V TTL and RS232/RS485(J11) | ||
| UART3 | ttymxc2 | 3.3V TTL J5 | ||
| UART4 | ttymxc3 | RS232 J11 1 | ||
| GW720x-C+ | UART1 | ttymxc0 | GPS (optional) | |
| UART2 | ttymxc1 | console: 3.3V TTL and RS232 J11 1 | ||
| UART3 | ttymxc2 | 3.3V TTL J5 | ||
| UART4 | ttymxc3 | RS232 J11 and RS232/RS485(J11) 1 | ||
| GW730x | UART1 | ttymxc0 | GPS (optional) | |
| UART2 | ttymxc1 | console: 3.3V TTL and RS232/RS485(J15) | ||
| UART3 | ttymxc2 | Bluetooth (optional) | ||
| UART4 | ttymxc3 | RS232 J11 1 | ||
| GW74xx | UART1 | ttymxc0 | GPS (optional) and 3.3V TTL to J14.3 (RX in) J14.4 (TX out) | |
| UART2 | ttymxc1 | console: 3.3V TTL and RS232/RS485(J15) | ||
| UART3 | ttymxc2 | Bluetooth (optional) | ||
| UART4 | ttymxc3 | RS232 (J15) 1 | ||
| Newport | GW610x | UART0 | ttyAMA0 | console: 3.3V TTL J9 |
| UART1 | ttyAMA1 | GPS (optional) | ||
| UART22 | ttyAMA2 | TTL J10 | ||
| UART32 | ttyAMA3 | - | ||
| GW620x | UART0 | ttyAMA0 | console: 3.3V TTL J12 | |
| UART1 | ttyAMA1 | GPS (optional) | ||
| UART22 | ttyAMA2 | RS232/RS485 J9 1 | ||
| UART32 | ttyAMA3 | RS232 J9 1 | ||
| GW630x | UART0 | ttyAMA0 | console: 3.3V TTL J17 | |
| UART1 | ttyAMA1 | GPS | ||
| UART22 | ttyAMA2 | RS232/RS485 J12 1 | ||
| UART32 | ttyAMA3 | RS232 J12 1 | ||
| GW640x | UART0 | ttyAMA0 | console: 3.3V TTL J18 | |
| UART1 | ttyAMA1 | GPS | ||
| UART22 | ttyAMA2 | RS232/RS485 J14 1 | ||
| UART32 | ttyAMA3 | RS232 J14 1 | ||
| Ventana | GW51xx | UART1 | ttymxc0 | GPS |
| UART2 | ttymxc1 | console: 3.3V TTL JTAG J10/J11 | ||
| UART5 | ttymxc4 | TTL J11 | ||
| GW52xx | UART1 | ttymxc0 | RS485/CAN/TTL J12 / RS232 J10 | |
| UART2 | ttymxc1 | console: 3.3V TTL JTAG J14 / RS232 J10 | ||
| UART5 | ttymxc4 | GPS | ||
| GW5910 | UART1 | ttymxc0 | RS232 J12 | |
| UART2 | ttymxc1 | console: 3.3V TTL JTAG J14 / RS232 J12 | ||
| UART3 | ttymxc2 | CC1352 | ||
| UART4 | ttymxc3 | WiFi/BLE | ||
| UART5 | ttymxc4 | GPS | ||
| GW53xx | UART1 | ttymxc0 | RS485/CAN/TTL J11 / RS232 J12 | |
| UART2 | ttymxc1 | console: 3.3V TTL JTAG J14 / RS232 J12 | ||
| UART5 | ttymxc4 | GPS | ||
| GW54xx | UART1 | ttymxc0 | RS485 J13 / RS232 J15 | |
| UART2 | ttymxc1 | console: 3.3V TTL JTAG J17 / RS232 J15 | ||
| UART5 | ttymxc4 | GPS | ||
| GW551x | UART2 | ttymxc1 | console: exp 3.3V TTL J3 | |
| UART3 | ttymxc2 | exp 3.3V TTL J3 | ||
| GW552x | UART2 | ttymxc1 | console: 3.3V TTL JTAG J7 | |
| UART3 | ttymxc2 | exp 3.3V TTL J5 | ||
| UART5 | ttymxc4 | exp 3.3V TTL J5 | ||
| GW553x | UART2 | ttymxc1 | console: 3.3V TTL JTAG J11 | |
| UART3 | ttymxc2 | exp 3.3V TTL JTAG J10 | ||
| UART4 | ttymxc3 | GPS | ||
| UART5 | ttymxc4 | exp 3.3V TTL JTAG J10 | ||
| GW16111 | UART2 | ttymxc1 | console: 3.3V TTL JTAG J8 / RS232 J16 / RS485 J20 | |
| UART3 | ttymxc2 | RS232 J16 | ||
- Depends on software configuration
- UART2/UART3 are configured in early boot firmware via the hwconfig variable (see [wiki:newport/bootloader#serialconfig here). Additionally CN80XX UART2 and UART3 can be steered via software PINSEL via software modification to any of the GPIO signals including the off-board DIO's - contact support@… for details
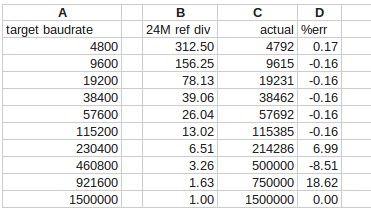
Baudrates
The maximum baudrate supported depends on the product family and sometimes whether or not you are using TTL or RS232 as at times a transceiver may limit the stream to below 250000 (consult the hardware manual). A safe and typical baudrate is 115200.
Flow control
Flow control refers to hardware or software handshaking that can tell a transmitter when its ok to send more data.
Hardware flow control is typically via RTS/CTS (request-to-send / clear-to-send) or via DTR/DSR (data-terminal-ready / data-set-ready). Depending on the board and port used you may be able to use hardware flow control.
Software flow control uses a specific character for start and stop and therefore cannot be used in binary data transfer.
Take care to set flow control properly. Typically this is done in Linux with the stty application. For example to disable the first UART's flow control on an IMX6 based Ventana product:
stty -crtscts -F /dev/ttymxc0
Serial Port Types (DCE vs DTE)
The Data Communication Equipment (DCE) pin assignments permit direct connection to a standard Data Terminal Equipment (DTE) PC running terminal emulation software. The inputs and outputs are swapped between DCE and DTE. Please pay careful attention to the connector pinout of any UART from the board's hardware user manual, specifically the TX/RX/RTS/CTS pin's direction (input vs output) to ensure proper interconnect with off-board equipment.
In certain scenarios, a null modem cable may be needed Null Modem Information
Please read more about the RS232 Specification here
serial Console
There are times when one may not care about serial Linux console because the serial port is desired for other uses.
See silenceconsole for details on silencing or changing the serial console for boot firmware, Linux kernel, and OS.
Hardware Flow Control
A few Gateworks products that provide TTL level and/or RS232 serial can optionally provide hardware flow control via RTS# and CTS# pins. In this configuration. All Gateworks products present serial from the Data Terminal Equipment (DTE) perspective where TX and RTS are outputs, and RX and CTS are inputs with one exception:
- Ventana UART's are in DCE mode by default however TX is still an output and RX is an input. Therefore Ventana UART's with flow control are pinned out as follows:
- TX (output)
- RX (input)
- RTS (input)
- CTS (output)
RS232
RS-232 is a standard for serial communication transmission of data. The most important aspects of the spec are:
- defines electical signal characteristics such as voltage levels, signalling rate, timing and slew-rate of signals
- mechanical characteristics such as pinouts
Many Gateworks boards have RS232 support (not to be confused with TTL level UART support which has different voltage and signalling specifications).
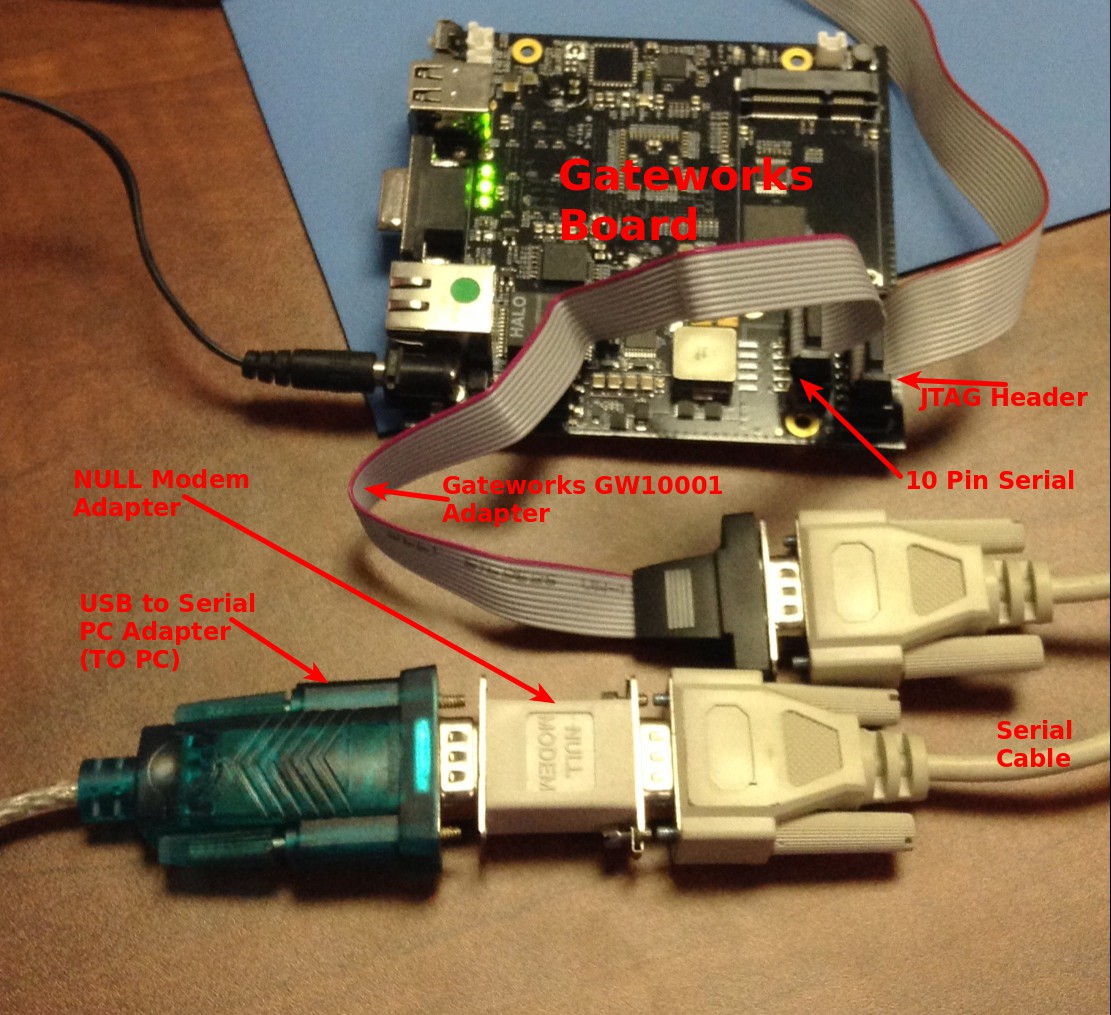
Example usage: RS232 connection to a PC
- Connect all hardware / cables
Note: A NULL MODEM adapter / cable may need to be used between the Gateworks board and a PC!

- The serial port must be configured on the Gateworks board using the stty command for the baud rate:
# stty --help BusyBox v1.19.4 (2013-06-26 04:34:22 PDT) multi-call binary. Usage: stty [-a|g] [-F DEVICE] [SETTING]... Without arguments, prints baud rate, line discipline, and deviations from stty sane -F DEVICE Open device instead of stdin -a Print all current settings in human-readable form -g Print in stty-readable form [SETTING] See manpage
Set the baud rate, example shown below for 115200:
root@OpenWrt:/# stty -F /dev/ttyS1 115200
Also Verify Flow Control: (adjust below example to exact application)
stty -crtscts -F /dev/ttyS1
- Configure PC:
- On the receiving PC, a terminal program can be used. For example:
- Windows: putty, hyperterm
- Linux: screen, minicom
- Example (adjust as necessary)
screen /dev/ttyS1 115200,cs8
- Example (adjust as necessary)
- Be sure to select the same baud rate, format (ie 8 data bits, no parity, 1 stop bit - aka 8N1 or cs8) and flow control as configured on the Gateworks board.
- On the receiving PC, a terminal program can be used. For example:
- Test Connection:
- A quick way to test this is to use an echo statement from the console of the Gateworks board like so:
# echo "0" > /dev/ttyS1
- A quick way to test this is to use an echo statement from the console of the Gateworks board like so:
The character '0' should appear on the serial console on the PC.
Troubleshooting:
- make sure you are either not using hardware/software flow control, or in the case that you do have hardware flow control (CTS/RTS or DTR/DSR) they are properly connected.See Link Here
- use a null-modem if needed (DTE vs DCE)
- make sure both ends are RS232 compliant (as opposed to TTL level logic)
RS485
Some Gateworks boards have RS485 transceivers connected to host CPU UART's. This often is an optional feature that must be loaded at the factory. Please contact support@… via email for more information.
RS485 uses a differential pair and is half-duplex such that the TX and RX share a differential pair on a multi-master bus and the TX and an enable that is controlled via one of:
- always enabled (only useful if there is only a single transmitter on the bus)
- connected to UART RTS line
- connected to host CPU GPIO
Note that RS485 is half-duplex and RS422 is full-duplex.
Because of the half-duplex nature, typically custom software needs to be written to:
- control the enabling of the transmit driver (on more modern boards and kernels this is done for you by the driver via device-tree and/or the TIOCSRS485 ioctl)
- receive the data you sent directly after sending (unless the driver does this for you)
- implement a protocol such that multiple masters know when it is there turn to transmit
In a typical scenario you may have two devices on an RS485 half-duplex bus, NodeA and NodeB and a conversation would look like this:
- NodeA enables its transmitter, sends out a request packet, then disables its transmitter and waits for a response
- NodeB waits for a request packet and until it sees one its transmitter is not enabled. When it receives the request it enables its transmitter, sends a response, then disables its transmitter.
- NodeA knows the exact nature of the response so it can wait until the message is complete then knows that it can transmit again
The following table and sections below provides per-board details of RS485:
| Family | Board | TXEN | Transceiver | Termination | Fail-Safe Bias | Notes |
|---|---|---|---|---|---|---|
| Venice | GW720x / GW730x / GW740x | RTS | SP335E | software selectable via 'rs485_term' gpio | included | TIOCSRS485 support |
| Newport | GW630x / GW640x | RTS | SP335E | software selectable via hwconfig | included | TIOCSRS485 support |
| Ventana | GW52xx (optional) | gpio193 | MAX14840 | optional | optional | TIOCSRS485 support |
| GW53xx (optional) | gpio193 | MAX14840 | optional | optional | TIOCSRS485 support | |
| GW54xx (optional) | gpio193 | MAX14840 | optional | optional | TIOCSRS485 support | |
| GW551x+GW16111 | gpio19 | MAX14840 | optional | 4.75k pull up/down | see ventana RS485 below | |
| GW5904 / GW5909 | RTS | MAX14840 | software selectable via 'rs485_term' gpio | included | TIOCSRS485 support | |
References:
- TI RS-485 Design Guide - excellent source of info regarding termination, multi-master transmission, line length etc
- https://en.wikipedia.org/wiki/RS-485
RS485 Termination
As a general rule, termination resistors should be placed at both far ends of the RS485 network. Without termination resistors reflections of fast driver edges can cause data corruption. Termination resistors also reduce electrical noise sensitivity due to lower impedance. The value of each termination resistor should be equal to the cable characteristic impedance (typically 120 ohms for twisted pairs).
Some boards with RS485 capability may have transceivers with specific fail-safe features within the transceiver however optional on-board termination resistors typically exist as well and it is the responsibility of the system designer to determine where termination needs to go and what values should be used. In general, gateworks boards with RS485 transceivers have an optional resistor for termination that can be loaded with a customer specified value. Contact sales@… via e-mail for more information.
Additionally some boards have software selectable termination via a gpio (see the table above)
References:
- Maxium Tutorial 763 - Guidelines for Proper Wiring of an RS-485 Network
- https://en.wikipedia.org/wiki/RS-485
RS485 Failsafe Bias Resistors
When inputs are between -200mV and +200mV the receiver output is 'undefined'. There are four common fault conditions that result in this undefined receiver output that can cause erroneous data:
- All transmitters in a system are not driving
- The receiver is not connected to the cable
- The cable has an open
- The cable has a short
Fail-safe biasing is used to keep the receiver's output in a defined state when one of these conditions occur. The biasing consists of a pull-up resistor on the noninverting line and a pull-down resistor on the inverting line. With proper biasing, the receiver will output a valid high when any one of the fault conditions occur. These fail-safe bias resistors should be placed at the receiver end of the transmission line.
Some boards with RS485 capability may have on-board termination resistor options and it is the responsibility of the system designer to determine where termination needs to go and what values should be used. In general, gateworks boards with RS485 transceivers have an optional resistor for termination that can be loaded with a customer specified value. Contact sales@… via e-mail for more information.
on-board failsafe bias resistors 4.75Kohm pulls and an optional on-board 121ohm load termination resistor.
References:
- Maxium Tutorial 763 - Guidelines for Proper Wiring of an RS-485 Network
- https://en.wikipedia.org/wiki/RS-485
Venice
Software must enable RS485 at boot via device-tree or use the TIOCSRS485 ioctl to configure TXEN - see below).
See below
Newport
The GW630x / GW640x have 2 CN80XX UART's (UART2/UART3: /dev/ttyAMA2 and /dev/ttyAMA3) going to a SP335E transceiver which allows selecting a variety of RS232/RS485 configurations:
- 2x RS232 w/o flow control
- 1x RS232 w/ flow control
- 1x RS485 half duplex
- 1x RS485 full duplex
RS485 modes feature:
- optional half-duplex, multi-drop RS485:
- CN80XX UART2 (/dev/ttyAMA2)
- optional on-board termination (enabled by gpio16)
- in-chip fail-safe protection to default idle inputs to logic-high (no external bias resistors required)
- TXEN connected to CN80XX UART2 RTS
The pl011 Linux driver supporting the CN80XX serial ports (SERIAL_AMBA_PL011 drivers/tty/serial/amba-pl011.c) supports RS485 via the TIOCSRS485 ioctl as of Linux 5.15 and this support has been backported to the Gateworks 5.10 kernel.
Software must enable RS485 at boot via device-tree or use the TIOCSRS485 ioctl to configure TXEN - see below).
Ventana
The GW52xx/GW53xx/GW54xx support optional half-duplex, multi-drop RS485:
- IMX6 UART1 (/dev/ttymxc0)
- MAX14840 transceiver
- TXEN connected to gpio193
- optional on-board termination resistor
- optional on-board fail-safe resistors (D+ pull-up and D- pull-down)
By 'optional' this means the baseboard design supports this, but it is not loaded on standard product therefore would be a Gateworks Special. Contact sales@… if interested to see if a configuration already exists.
Software must enable RS485 at boot via device-tree or use the TIOCSRS485 ioctl to configure TXEN - see below).
The GW551x + GW16111 breakout module support half-duplex, multi-drop RS485:
- IMX6 UART2 (/dev/ttymxc1)
- Note that a jumper must be placed on J10:2-3 to enable RS485 RX (routes UART2 RX to RS485 vs RS232 transceiver)
- Note that a jumper must be placed on J10:1-2 to enable RS232 (routes UART2 to RS232 transceiver)
- MAX14840 transceiver
- TXEN connected to gpio19, or always enabled, or enable on transmit (selected via J10 jumper)
- always drive mode - jumpers placed on J10:2-3 and J10:4-5 will cause the transceiver to always have its transmit enabled. This is useful for fast signal switching (fast/large bus) if you are using a single master and one or more receivers.
- TXD drive mode - jumpers placed on J10:2-3 and J10:7-8 will cause the transceiver to be enabled only when TX is asserted. Because there are 4.75k pull's on D+/D- the bus is never 'idle'. This is useful for multi-master scenarios but could pose issues with fast/large busses if the 4.75pull's are not strong enough to switch the signals quick enough.
- DIO-drive mode - jumpers placed on J10:2-3 and J10:7-8 will cause the transceiver to be enabled only when IMX_DIO1 (gpio19) is asserted high. This is useful for fast/large busses where the TXD drive mode doesn't provide fast enough switching. If using this mode you either need to manage the assertion/de-assertion of gpio19 in usersapce or modify the GW551x device-tree to configure rs485-txen for TIOCSRS485 support by adding fsl,rs485-gpio-txen = <&gpio1 19 GPIO_ACTIVE_HIGH>; to the uart2 device-tree node in arch/arm/boot/dts/imx6qdl-gw551x.dtsi
- 121ohm termination (R38) is loaded and can be enabled by placing a jumper on J10:9-10
- 4.75k pull-up on D+, 4.75k pull-down on D- fail-safe bias resistors are loaded (R37/R40) (bus defaults to logic 1 - never idle)
TIOCSRS485 ioctl
For UART's that have a built-in half-duplex mode capable of automatically controlling line direction via a transmit enable by toggling the UART's RTS signal the TIOCSRS485 ioctl can be used to configure RS485 TXEN.
Some UART drivers such as the IMX SoC's also allow generic GPIO's to be used for this by configuring the UART via the device-tree rts-gpios property.
Code Examples:
- ANSI-C:
#include <linux/serial.h> /* Include definition for RS485 ioctls: TIOCGRS485 and TIOCSRS485 */ #include <sys/ioctl.h> /* Open your specific device (e.g., /dev/mydevice): */ int fd = open ("/dev/mydevice", O_RDWR); if (fd < 0) { /* Error handling. See errno. */ } struct serial_rs485 rs485conf; /* Enable RS485 mode: */ rs485conf.flags |= SER_RS485_ENABLED; /* Set logical level for RTS pin equal to 1 when sending: */ rs485conf.flags |= SER_RS485_RTS_ON_SEND; /* or, set logical level for RTS pin equal to 0 when sending: */ rs485conf.flags &= ~(SER_RS485_RTS_ON_SEND); /* Set logical level for RTS pin equal to 1 after sending: */ rs485conf.flags |= SER_RS485_RTS_AFTER_SEND; /* or, set logical level for RTS pin equal to 0 after sending: */ rs485conf.flags &= ~(SER_RS485_RTS_AFTER_SEND); /* Set rts delay before send, if needed: */ rs485conf.delay_rts_before_send = ...; /* Set rts delay after send, if needed: */ rs485conf.delay_rts_after_send = ...; /* Set this flag if you want to receive data even while sending data */ rs485conf.flags |= SER_RS485_RX_DURING_TX; if (ioctl (fd, TIOCSRS485, &rs485conf) < 0) { /* Error handling. See errno. */ } /* Use read() and write() syscalls here... */ /* Close the device when finished: */ if (close (fd) < 0) { /* Error handling. See errno. */ }
Some Linux UART drivers that call the 'uart_get_rs485_mode' function allow you to configure this behavior on boot via device-tree properties that can be added to the UART device-tree node:
- linux,rs485-enabled-at-boot-time - enables the rs485 feature at boot time. It can be disabled later with proper ioctl
- rs485-rts-delay - Delay between RTS signal and beginning of data sent in milliseconds corresponding to the delay before sending data
- rs485-rx-during-tx - enables the receiving of data even while sending data
- rs485-rts-active-low - drive RTS low when sending (default is high)
- rs485-term-gpios - GPIO pin to enable RS485 bus termination (if defined will drive this low when the UART is configured). As there is no API to alter this behavior often its best to leave this up to userspace GPIO control (unless driving low to disable it on boot is what you want)
An example of using device-tree to enable RS485 TXEN configuration at boot can be seen here
See also:
- https://docs.kernel.org/driver-api/serial/serial-rs485.html
- https://www.kernel.org/doc/Documentation/serial/serial-rs485.txt
- https://www.kernel.org/doc/Documentation/devicetree/bindings/serial/rs485.yaml
Code Examples
General Linux UART use
Here is an example application that demonstrates how to configure the UART (including TIOCSRS485 ioctl to for RS485 transmit enable) as well as sending and receiving data:
#include <ctype.h> #include <errno.h> #include <stdlib.h> #include <stdio.h> #include <string.h> #include <termios.h> #include <time.h> #include <unistd.h> #include <fcntl.h> #include <sys/ioctl.h> #include <linux/serial.h> #ifndef TIOCSRS485 #define TIOCSRS485 0x542F #endif /** main function */ int main(int argc, char** argv) { struct termios orig_ttystate, ttystate; int fd, sz, rz, bytes; speed_t speed; const char *baud, *mode, *dev; int timeout = 2; // time in seconds to wait for response char *msg = NULL; char buf[8192]; time_t start; if (argc < 4) { fprintf(stderr, "usage: %s <device> <baud> <mode> [<message>]\n", argv[0]); exit(1); } dev = argv[1]; baud = argv[2]; mode = argv[3]; if (argc > 4) msg = argv[4]; // open device fd = open(dev, O_RDWR | O_NONBLOCK | O_NOCTTY); if (fd <= 0) { perror("open"); exit(-1); } // get original ttystate tcgetattr(fd, &orig_ttystate); // create a sane TTY state (raw mode, no HW/SF flow control) memset(&ttystate, 0, sizeof(ttystate)); // enable receiver and ignore modem status lines ttystate.c_cflag |= CREAD; ttystate.c_cflag |= CLOCAL; // data-size ttystate.c_cflag &= ~CSIZE; switch(mode[0]) { case '5': ttystate.c_cflag |= CS5; break; case '6': ttystate.c_cflag |= CS6; break; case '7': ttystate.c_cflag |= CS7; break; case '8': ttystate.c_cflag |= CS8; break; default: fprintf(stderr, "invaid character size in %s\n", mode); break; } // parity ttystate.c_cflag &= ~PARODD; ttystate.c_cflag &= ~PARENB; switch(toupper(mode[1])) { case 'N': break; // no parity case 'O': ttystate.c_cflag |= (PARENB | PARODD); break; // odd case 'E': ttystate.c_cflag |= PARENB; break; // even default: fprintf(stderr, "invaid parity in %s\n", mode); break; } // stop bits switch(toupper(mode[2])) { case '1': ttystate.c_cflag &= ~CSTOPB; break; case '2': ttystate.c_cflag |= CSTOPB; break; default: fprintf(stderr, "invaid stop bit mode in %s\n", mode); break; } // baudrate switch(atoi(baud)) { case 1200: speed = B1200; break; case 2400: speed = B2400; break; case 9600: speed = B9600; break; case 19200: speed = B19200; break; case 38400: speed = B38400; break; case 57600: speed = B57600; break; case 115200: speed = B115200; break; case 230400: speed = B230400; break; case 460800: speed = B460800; break; default: fprintf(stderr, "invalid baud rate %s\n", baud); break; } if (cfsetispeed(&ttystate, speed)) perror("cfsetispeed"); if (cfsetospeed(&ttystate, speed)) perror("cfsetospeed"); // set tty state printf("setting ttystate\n"); if (tcsetattr(fd, TCSANOW, &ttystate)) perror("tcsetattr"); // configure rs485 { struct serial_rs485 rs485; printf("enabling rs485 via TIOCSRS485\n"); memset(&rs485, 0, sizeof(rs485)); rs485.flags = SER_RS485_ENABLED | SER_RS485_RTS_ON_SEND; if (ioctl(fd, TIOCSRS485, &rs485)) perror("TIOCSRS485"); } // flush in/out data tcflush(fd, TCIOFLUSH); // transmit data if (msg) { printf("sending...\n"); if (strcmp("STDIN", msg) == 0) { while (1) { sz = read(0, buf, sizeof(buf)); printf("transmitting %d bytes...\n", sz); if (write(fd, buf, sz) != sz) { perror("tx"); break; } } } else { sz = strlen(msg) + 1; printf("transmitting %d bytes...\n", sz); if (write(fd, msg, sz) != sz) perror("tx"); } } // receive data printf("reading...\n"); while (1) { memset(buf, 0, sizeof(buf)); rz = read(fd, buf, sizeof(buf) - 1); if (rz < 0) { perror("read failed"); break; } if (rz == 0) continue; printf("rx %d(%d): '%s'\n", rz, strlen(buf), buf); } // restore terminal state tcsetattr(fd, TCSANOW, &orig_ttystate); close(fd); return 0; }
Usage:
./tx_enable <device> <baud> <mode> [<message>] #EXAMPLE: ./tx_enable /dev/ttymxc0 115200 8N1 [hello_world]
Specific Product / Model Notes
Venice
Most Venice products have a flexible MaxLinear SP335E RS-232/RS-485/RS-422 transceiver which is software configurable. For these boards a device-tree frament is used to configure the kernel appropriately for the mode you desire:
- 2x RS232 TX/RX (default configuration requiring no dt overlay)
- 1x RS232 TX/RX/RTS/CTS (uses rs232-rts dt overlay)
- 1x RS485 (half duplex) (uses rs485 dt overlay)
- 1x RS422 (full duplex) (uses rs422 dt overlay)
To use dt overlays you specify the appropriate overlay(s) in the U-Boot fdt_overlays environment variable in the U-Boot bootloader. This instructs U-Boot to load and apply those dt overlay fragments to the board dt before booting Linux. Note that you can have more than one dt overlay specified in the fdt_overlays separated by a space:
- imx8mm-venice-gw730x-0x RS485:
setenv fdt_overlays "$fdt_overlays imx8mm-venice-gw73xx-0x-rs485.dtbo" saveenv
- imx8mm-venice-gw730x-0x RS422:
setenv fdt_overlays "imx8mm-venice-gw73xx-0x-rs422.dtbo" saveenv - imx8mm-venice-gw730x-0x RS232-CTSRTS flow control:
setenv fdt_overlays "imx8mm-venice-gw73xx-0x-rs232-rts.dtbo" saveenv - imx8mm-venice-gw730x-0x default 2x RS232 TX/RX:
setenv fdt_overlays saveenv
For Venice when configured for RS485 or RS422 you do not need to use the TIOCSRS485 as the dt fragments will enable this on bootup as well as configure the UARTs transmit enable pin.
If you wish to enable the SP335E on-board RS485 termination (which is disabled by default) you can set the GPIO manually:
- GW730x/GW720x:
- U-Boot:
u-boot=> gpio status GPIO1_0 Bank GPIO1_: GPIO1_0: output: 0 [x] rs485_term.gpio-hog u-boot=> gpio set GPIO1_0 gpio: pin GPIO1_0 (gpio 0) value is 1
- Linux (sysfs) (deprecated API)
root@focal-venice:~# grep rs485_term /sys/kernel/debug/gpio gpio-0 (rs485_term ) root@focal-venice:~# echo 0 > /sys/class/gpio/export root@focal-venice:~# echo out > /sys/class/gpio/gpio0/direction root@focal-venice:~# echo 1 > /sys/class/gpio/gpio0/value
- Linux (gpiolib)
root@focal-venice:~# gpiofind "rs485_term" gpiochip0 0 root@focal-venice:~# gpioset --mode=signal --background gpiochip0 0=1
- Note we have to tell
gpiosetto remaining running until it receives a signal in order to keep the GPIO line from reverting back to its original state when the process exits. If you use the deprecatedsysfsAPI or set it in U-Boot it may be easier
- Note we have to tell
- U-Boot:
Note that if you want to be able to change the UART mode at runtime instead of at boot time you can use the 'rs232-rts' overlay which adds the RTS signal capability to the UART, configure the various gpios manually at runtime via sysfs or gpiod, and use the TIOCSRS485 ioctl to invoke RS485 mode with the polarity of the RTS pin handled by setting rs485conf.flags SER_RS485_RTS_AFTER_SEND
Newport
Most Newport products have a flexible MaxLinear SP335E RS-232/RS-485/RS-422 transceiver which is software configurable. For these boards the Bootloader hwconfig environment variable can be used to configure the functionality of the serial ports at power-up between dual RS232 without flow control (default), single RS232 with hardware flow control, and RS485 (full/half duplex and optional termination). See Newport bootloader hwconfig for more details.
If you wish to configure the SP335E transceiver yourself you can control it at runtime through the following GPIO's (which is what the Boot firmware will do for you via the hwconfig variable):
- GPIO21: UART_HALF - selects full (low) or half (high) duplex (RS485 mode only)
- GPIO22: UART_TERM - disables (low) or enables (high) on-chip termination (RS485 mode only)
- GPIO23: UART_RS485 - selects between RS232 (low) and RS245 (high) modes
See gpio for details on using GPIO from Linux userspace or use the U-Boot bootloader gpio command.
The CN80XX / CN81XX has 4 TTL level UARTs with the following mapping:
| UART | device-tree alias | Linux device |
|---|---|---|
| UART0 | serial0 | /dev/ttyAMA0 |
| UART1 | serial1 | /dev/ttyAMA1 |
| UART2 | serial2 | /dev/ttyAMA2 |
| UART3 | serial3 | /dev/ttyAMA3 |
The Linux kernel uses the console parameter from the Kernel cmdline to specify the serial console. You can usually modify the 'console' U-boot env variable if you want to change the default console UART as it typically gets passed on to the kernel:
Newport > setenv console '/dev/ttyAMA2,115200n8'; saveenv
- Specify that Linux and userspace use UART2
The U-Boot Bootloader (as well as kernel if the console cmdline is not specified) uses the device-tree 'chosen' node 'stdout-path' property to specify serial console. For example the default is specified in the cn81xx-linux.dtsi:
chosen {
stdout-path = "serial0:115200n8";
};
If you wish to change the serial console in the BDK or ATF, you will need to modify the source code which will take some digging.
Serial Console
Serial Console Window Size
console applications running inside Linux virtual terminal applications (xterm, rxvt etc) will receive SIGWINCH after a resize operation has taken place and adjust accordingly.
When using a serial console there is no such mechanism and you can see the affect of this by connecting to a serial console and showing your size either via env vars or via the 'stty size' app:
~# echo $LINES $COLUMNS 24 80 ~# stty size 24 80
No matter how you resize that virtual terminal window (ie xterm), the above commands will always report the same size.
It is possible for the application to actively ask for the current console window size. This can be achieved by sending a ANSI code to position the cursor to 999,999 then request the cursor position.
The resize app from the xterm package does this, but here is also a cleaner version with less dependencies:
wget http://web.archive.org/web/20081224152013/http://www.davehylands.com/gumstix-wiki/resize/resize.c gcc resize.c -o /usr/local/bin/resize
You can also do this with a shell script that do the same thing:
resize() { old=$(stty -g) stty raw -echo min 0 time 5 printf '\0337\033[r\033[999;999H\033[6n\0338' > /dev/tty IFS='[;R' read -r _ rows cols _ < /dev/tty stty "$old" #echo "size:${cols}x${rows}" stty cols "$cols" rows "$rows" }
you could add this and the following to your /etc/bash.bashrc so that the console size is detected and adjusted on login:
# IMX6 serial console [[ "$(tty)" =~ "/dev/ttymxc" ]] && { resize; } # Newport serail console [[ "$(tty)" =~ "/dev/ttyAMA" ]] && { resize; }
Some people also opt to use the 'trap' shell function to execute it on every command in order to adjust continually:
# IMX6 serial console [[ "$(tty)" =~ "/dev/ttymxc" ]] && { trap resize DEBUG; } # Newport serail console [[ "$(tty)" =~ "/dev/ttyAMA" ]] && { trap resize DEBUG; }
Notes:
- 'tty' shows the name of the terminal device (ie /dev/ttymxc1 if on a Ventana serial console)
- 'stty size' outputs the current terminal size based on what the kernel thinks
- this has nothing to do with terminal type (TERM)
- when remotely connected to a board via ssh for example, this isn't an issue as that can use SIGWINCH
orts 24 80
- the COLUMNS and LINES env variables reflect the size of the tty
- resizable terminals are the result of NAWS 'Negotiate About Window Size' from RFC 1073 Telnet Window Size Option
References:
- https://unix.stackexchange.com/questions/16578/resizable-serial-console-window
- http://web.archive.org/web/20081224152013/http://www.davehylands.com/gumstix-wiki/resize/resize.c
/* resize.c */ #include <stdio.h> #include <ctype.h> #include <stdlib.h> #include <unistd.h> #include <sys/types.h> #include <string.h> #include <termio.h> #include <termios.h> #include <signal.h> #include <pwd.h> #define ESC "\033" #define TIMEOUT 10 char *myname; char getsize[] = ESC "7" ESC "[r" ESC "[999;999H" ESC "[6n"; char restore[] = ESC "8"; struct termios tioorig; char size[] = ESC "[%d;%dR"; int tty; FILE *ttyfp; static void onintr (int sig); static void resize_timeout (int sig); static void Usage (void); static void readstring (FILE *fp, char *buf, char *str); char * x_basename(char *name) { char *cp; cp = strrchr(name, '/'); return (cp ? cp + 1 : name); } /* tells tty driver to reflect current screen size */ int main (int argc, char **argv) { int rows, cols; struct termios tio; char buf[BUFSIZ]; struct winsize ws; char *name_of_tty; myname = x_basename(argv[0]); if (argc > 1) Usage(); name_of_tty = "/dev/tty"; if ((ttyfp = fopen (name_of_tty, "r+")) == NULL) { fprintf (stderr, "%s: can't open terminal %s\n", myname, name_of_tty); exit (1); } tty = fileno(ttyfp); tcgetattr(tty, &tioorig); tio = tioorig; tio.c_iflag &= ~ICRNL; tio.c_lflag &= ~(ICANON | ECHO); tio.c_cflag |= CS8; tio.c_cc[VMIN] = 6; tio.c_cc[VTIME] = 1; signal(SIGINT, onintr); signal(SIGQUIT, onintr); signal(SIGTERM, onintr); tcsetattr(tty, TCSADRAIN, &tio); write(tty, getsize, strlen(getsize)); readstring(ttyfp, buf, size); if(sscanf (buf, size, &rows, &cols) != 2) { fprintf(stderr, "%s: Can't get rows and columns\r\n", myname); onintr(0); } write(tty, restore, strlen(restore)); if (ioctl (tty, TIOCGWINSZ, &ws) != -1) { /* we don't have any way of directly finding out the current height & width of the window in pixels. We try our best by computing the font height and width from the "old" struct winsize values, and multiplying by these ratios...*/ if (ws.ws_col != 0) ws.ws_xpixel = cols * (ws.ws_xpixel / ws.ws_col); if (ws.ws_row != 0) ws.ws_ypixel = rows * (ws.ws_ypixel / ws.ws_row); ws.ws_row = rows; ws.ws_col = cols; ioctl (tty, TIOCSWINSZ, &ws); } tcsetattr(tty, TCSADRAIN, &tioorig); signal(SIGINT, SIG_DFL); signal(SIGQUIT, SIG_DFL); signal(SIGTERM, SIG_DFL); exit(0); } static void readstring(register FILE *fp, register char *buf, char *str) { register int last, c; signal(SIGALRM, resize_timeout); alarm (TIMEOUT); if ((c = getc(fp)) == 0233) { /* meta-escape, CSI */ *buf++ = c = ESC[0]; *buf++ = '['; } else { *buf++ = c; } if(c != *str) { fprintf(stderr, "%s: unknown character, exiting.\r\n", myname); onintr(0); } last = str[strlen(str) - 1]; while((*buf++ = getc(fp)) != last) ; alarm (0); *buf = 0; } static void Usage(void) { fprintf(stderr, "Usage: %s\n" " sets size via ioctl\n", myname); exit(1); } static void resize_timeout(int sig) { fprintf(stderr, "\n%s: timeout occurred\r\n", myname); onintr(sig); } /* ARGSUSED */ static void onintr(int sig) { tcsetattr (tty, TCSADRAIN, &tioorig); exit(1); }
Attachments (2)
- baudrates.jpg (34.9 KB ) - added by 9 years ago.
- serial2391.jpg (270.5 KB ) - added by 9 years ago.
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip